


Tác giả: Alex McFarland
Ngày 1 tháng 12 năm 2023
Trong thế giới ngày càng phát triển của robot học, một sự hợp tác đột phá giữa Đại học Princeton và Google nổi bật. Các kỹ sư đến từ những viện đại học uy tín này đã phát triển một phương pháp đổi mới, giúp robot học được một kỹ năng quan trọng: nhận biết khi nào họ cần sự giúp đỡ và cách để yêu cầu nó. Sự phát triển này đánh dấu một bước tiến quan trọng trong lĩnh vực robot học, gắn kết khoảng cách giữa chức năng tự động và tương tác giữa con người và robot.
Hành trình hướng tới việc có những robot thông minh và độc lập hơn luôn bị một thách thức quan trọng: sự phức tạp và mơ hồ của ngôn ngữ con người. Không giống như sự rõ ràng nhị phân của mã máy tính, ngôn ngữ con người đầy những sắc thái và tinh tế, khiến nó trở thành một mê cung đối với robot. Ví dụ, một lệnh đơn giản như “nâng cái tô lên” có thể trở thành một nhiệm vụ phức tạp khi có nhiều tô. Robot, được trang bị khả năng cảm nhận môi trường của mình và phản ứng với ngôn ngữ, thường thấy khó khăn khi đối mặt với những mơ hồ ngôn ngữ như vậy.
Để đối mặt với thách thức này, nhóm nghiên cứu của Đại học Princeton và Google đã giới thiệu một phương pháp mới độc đáo để đo lường “mờ” của ngôn ngữ con người. Kỹ thuật này về cơ bản đo lường mức độ không chắc chắn trong các lệnh ngôn ngữ và sử dụng độ đo này để hướng dẫn các hành động của robot. Trong tình huống mà một lệnh có thể dẫn đến nhiều diễn giải khác nhau, robot hiện có khả năng đo lường mức độ không chắc chắn và quyết định khi nào cần tìm kiếm sự làm rõ thêm. Ví dụ, trong một môi trường với nhiều tô, mức độ không chắc chắn cao sẽ khiến robot hỏi xem nên nâng cái tô nào, từ đó tránh khỏi các lỗi hoặc không hiệu quả có thể xảy ra.
Phương pháp này không chỉ làm cho robot có khả năng hiểu ngôn ngữ tốt hơn mà còn nâng cao tính an toàn và hiệu suất của chúng trong thực hiện nhiệm vụ. Bằng cách tích hợp các mô hình ngôn ngữ lớn (LLMs) như những mô hình đằng sau ChatGPT, các nhà nghiên cứu đã thực hiện một bước tiến quan trọng để làm cho hành động của robot phù hợp hơn với kỳ vọng và nhu cầu của con người.
Vai trò của các Mô hình Ngôn ngữ Lớn
Sự tích hợp của các Mô hình Ngôn ngữ Lớn (LLMs) đóng một vai trò quan trọng trong phương pháp mới này. LLMs đóng vai trò quan trọng trong việc xử lý và hiểu ngôn ngữ con người. Trong ngữ cảnh này, chúng được sử dụng để đánh giá và đo lường mức độ không chắc chắn có trong các lệnh ngôn ngữ được đưa ra cho robot.
Tuy nhiên, sự phụ thuộc vào LLMs không phải là không có nhược điểm. Như nhóm nghiên cứu đã chỉ ra, kết quả từ LLMs đôi khi có thể không đáng tin cậy.
Anirudha Majumdar, giáo sư trợ giảng tại Đại học Princeton, nhấn mạnh sự quan trọng của sự cân nhắc này:
“Việc mù quáng theo kế hoạch được tạo ra bởi một LLM có thể khiến robot hoạt động một cách không an toàn hoặc không đáng tin cậy, và vì vậy chúng ta cần những robot dựa trên LLM của mình biết khi chúng không biết.”
Điều này làm nổi bật sự cần thiết của một phương pháp tinh tế, trong đó LLMs được sử dụng như là công cụ hướng dẫn thay vì làm những người ra quyết định không thể sai lầm.
Ứng Dụng Thực Tế và Kiểm Thử
Sự thực tế của phương pháp này đã được kiểm thử trong các tình huống khác nhau, minh họa sự linh hoạt và hiệu quả của nó. Một trong những thử nghiệm này liên quan đến một cánh tay robot, được giao nhiệm vụ phân loại đồ chơi thức ăn vào các danh mục khác nhau. Thiết lập đơn giản này đã chứng minh khả năng của robot trong việc thực hiện nhiệm vụ với các lựa chọn rõ ràng một cách hiệu quả.
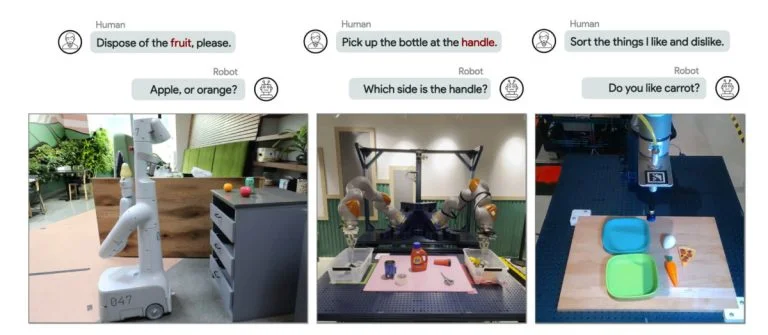
Độ phức tạp đã tăng đáng kể trong một thử nghiệm khác với một cánh tay robot được lắp đặt trên một nền tảng có bánh xe trong một căn bếp văn phòng. Ở đây, robot đối mặt với những thách thức thực tế như việc xác định vật phẩm đúng để đặt vào lò vi sóng khi có nhiều lựa chọn.
Qua những thử nghiệm này, robot đã thành công chứng minh khả năng sử dụng sự không chắc chắn được đo lường để ra quyết định hoặc tìm kiếm sự làm rõ thêm, từ đó xác nhận tính khả dụng thực tế của phương pháp này.
Tiềm năng ứng dụng và nghiên cứu trong tương lai

Nhìn vào tương lai, tác động của nghiên cứu này mở rộng xa hơn ngoài các ứng dụng hiện tại. Đội ngũ nghiên cứu, do Majumdar và sinh viên nghiên cứu Allen Ren đứng đầu, đang khám phá cách tiếp cận này có thể được áp dụng vào các vấn đề phức tạp hơn trong nhận thức robot và Trí tuệ Nhân tạo. Điều này bao gồm các tình huống nơi mà robot cần kết hợp thông tin thị giác và ngôn ngữ để đưa ra quyết định, từ đó thu hẹp thêm khoảng cách giữa sự hiểu biết của robot và tương tác của con người.
Nghiên cứu tiếp tục không chỉ nhằm mục tiêu nâng cao khả năng của robot thực hiện các nhiệm vụ với độ chính xác cao hơn mà còn để dẫn dắt robot điều hướng thế giới với sự hiểu biết tương tự như nhận thức của con người. Nghiên cứu này có thể mở đường cho việc phát triển các loại robot không chỉ hiệu quả và an toàn hơn mà còn đồng điệu hơn với những yêu cầu tinh tế của môi trường con người.