


Tác giả: Alex McFarland
Ngày 14 tháng 2 năm 2024
Trong vũ trụ rộng lớn của tự nhiên, một số nguồn cảm hứng sâu sắc nhất đến từ những sinh vật nhỏ bé nhất. Côn trùng, thường bị bỏ qua do kích thước nhỏ bé của chúng, thực sự là những kỳ tích về điều hướng và hiệu suất. Khả năng của chúng để điều hướng qua môi trường phức tạp với một bộ não không lớn hơn một đầu đinh đã lâu làm say mê cả những nhà khoa học và kỹ sư. Dẫn đầu trong việc khám phá những bí mật này là nhà vật lý Elisabetta Chicca, người công trình gần đây của bà nối kết khoảng cách giữa hiểu biết sinh học và sáng tạo công nghệ.
Chicca đã bắt đầu hành trình giải mã cách những sinh vật nhỏ bé này đạt được những kỳ tích đáng kinh ngạc như thế nào. Công việc của bà không chỉ làm sáng tỏ những bí ẩn về điều hướng của côn trùng mà còn mở đường cho sự tiến bộ trong máy tính tiết kiệm năng lượng và robot.
Mở Khóa Điều Hướng Của Côn Trùng
Mặc dù tài nguyên thần kinh của chúng bị hạn chế, nhưng côn trùng lại thể hiện những kỹ năng điều hướng đáng kinh ngạc. Chúng dễ dàng tránh các chướng ngại vật và di chuyển thông minh qua những khe hở nhỏ nhất, một thành tựu đã làm đau đầu các nhà khoa học suốt nhiều năm. Điểm chính của khả năng này nằm ở cách cảm nhận động của chúng về thế giới.
Trong nghiên cứu của mình, Chicca giải thích rằng một khía cạnh then chốt của điều hướng côn trùng là cách chúng cảm nhận chuyển động. Điều này giống như trải nghiệm khi ngồi trên một chuyến tàu và quan sát cảnh quan: cây cối gần đây có vẻ di chuyển nhanh hơn so với những ngôi nhà xa xôi. Côn trùng sử dụng sự chênh lệch về tốc độ chuyển động này để đo lường khoảng cách và điều hướng. Phương pháp đơn giản nhưng hiệu quả này hoạt động tốt khi di chuyển theo đường thẳng. Tuy nhiên, thế giới thực tế hiếm khi đơn giản như vậy.
Côn trùng thích nghi với sự phức tạp của môi trường bằng cách đơn giản hóa hành vi của chúng. Thông thường, chúng bay theo đường thẳng, rẽ và sau đó tiếp tục đi theo một đường thẳng khác. Các quan sát của Chicca đã tiết lộ một bài học quan trọng: những hạn chế về tài nguyên có thể được cân bằng bằng các điều chỉnh hành vi.
Hành trình từ những hiểu biết sinh học đến các ứng dụng robot là một câu chuyện về sự hợp tác giữa các lĩnh vực. Thorben Schoepe, một sinh viên nghiên cứu tiến sĩ dưới sự giám sát của Chicca, đã phát triển một mô hình mô phỏng hoạt động thần kinh của côn trùng, sau đó được dịch thành một robot nhỏ có thể điều hướng.
Robot này, thể hiện nguyên tắc điều hướng của côn trùng, là sản phẩm của sự hợp tác chặt chẽ với Martin Egelhaaf, một nhà nghiên cứu sinh học thần kinh nổi tiếng từ Đại học Bielefeld. Sự thành thạo của Egelhaaf trong việc hiểu các nguyên lý tính toán của côn trùng đã quan trọng trong việc phát triển một mô hình mô phỏng chính xác các chiến lược điều hướng của chúng.
Những Kỳ Tích Điều Hướng Của Robot
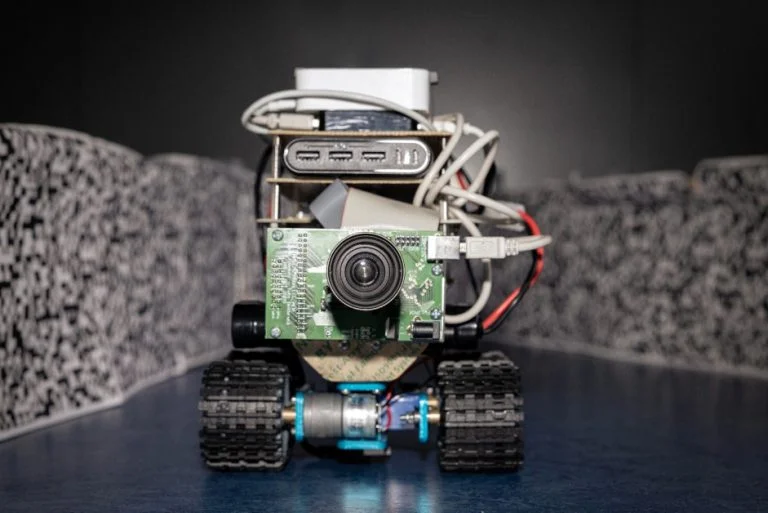
Đánh giá đích thực cho bất kỳ mô hình khoa học nào nằm trong ứng dụng thực tế của nó. Trong trường hợp của nghiên cứu của Chicca, bản sao robot của bộ não của một loài côn trùng đã thể hiện khả năng của mình trong một loạt các thử nghiệm phức tạp. Điều đáng chú ý nhất trong số đó là khả năng điều hướng của robot qua một hành lang, với các bức tường được trang trí bằng các họa tiết ngẫu nhiên. Bố cục này, được thiết kế để mô phỏng các tác động hình ảnh đa dạng mà một loài côn trùng gặp phải, là một khóa học thách thức đối với bất kỳ hệ thống điều hướng nào.
Robot, trang bị với mô hình của Thorben Schoepe, đã thể hiện khả năng đáng kinh ngạc để duy trì một con đường trung tâm trong hành lang, một hành vi tương đối giống với của côn trùng. Điều này được đạt được bằng cách điều khiển hướng về các khu vực có chuyển động ít rõ ràng nhất, mô phỏng chiến lược tự nhiên của côn trùng để đo lường khoảng cách và hướng đi. Sự thành công của robot trong môi trường này là một sự chứng thực thuyết phục cho mô hình.
Vượt qua hành lang, robot đã được thử nghiệm trong các môi trường ảo khác nhau, mỗi môi trường đều đặt ra những thách thức riêng của nó. Dù đó là điều hướng xung quanh các chướng ngại vật hoặc tìm đường qua các khe hở nhỏ, robot đã hiển thị một tính linh hoạt và hiệu suất gợi nhớ đến các loài côn trùng sinh học của nó. Chicca kết luận rằng khả năng của mô hình để thực hiện một cách nhất quán trên các cài đặt khác nhau không chỉ là một minh chứng cho sự tài năng kỹ thuật, mà còn là một phản ánh của sự hiệu quả và tính đa dạng cơ bản của điều hướng côn trùng.
Hiệu Quả trong Robotics: Một Mô Hình Mới
Thế giới của robotics đã lâu bị chiếm đóng bởi các hệ thống học và thích nghi thông qua việc lập trình và xử lý dữ liệu một cách rộng rãi. Phương pháp này, mặc dù hiệu quả, thường đòi hỏi tài nguyên tính toán và năng lượng đáng kể. Nghiên cứu của Chicca giới thiệu một sự thay đổi mô hình, lấy cảm hứng từ thế giới tự nhiên nơi mà hiệu quả là chìa khóa.
Như Chicca chỉ ra, côn trùng được sinh ra với khả năng bẩm sinh để điều hướng một cách hiệu quả từ đầu, mà không cần sự học tập hoặc lập trình một cách rộng rãi. Sự hiệu quả “cứng cáp” này đứng ngược lại hoàn toàn với phương pháp truyền thống trong robotics. Bằng cách mô phỏng những nguyên tắc sinh học này, robot có thể đạt được một mức độ hiệu quả mà hiện tại không thể đạt được với các phương pháp truyền thống.
Chicca mường tượng một tương lai nơi robotics không chỉ là về học và thích nghi, mà còn về hiệu quả bẩm sinh. Phương pháp này có thể dẫn đến việc phát triển các robot nhỏ hơn, sử dụng ít năng lượng hơn, và phù hợp hơn với nhiều môi trường khác nhau. Đó là một góc nhìn thách thức tình trạng hiện tại và mở ra các khả năng mới trong thiết kế và ứng dụng của các hệ thống robot.
Bạn có thể đọc toàn bộ nghiên cứu tại đây.